Общо описание
Шината CAN е автомобилна шина, разработена от Bosch, позволяваща на микроконтролерите и устройствата да комуникират помежду си в превозно средство без хост компютър. CAN bus е протокол на базата на съобщения, създаден специално за автомобилни приложения, но сега се използва и в други области като аерокосмическата, промишлената автоматизация и медицинското оборудване. Става международен стандарт (ISO 11898) през 1994 г. и е специално разработен за бърз сериен обмен на данни между електронните контролери в моторните превозни средства. Тя свързва отделните системи и сензори като алтернатива на конвенционалните многожични кабелни снопове. Позволява на автомобилните компоненти да комуникират по едно-или двупроводна мрежова шина за данни до 1Mbps.
CAN шината е един от петте протокола, използвани в стандарта за диагностика на превозни средства OBD-II.
Външен вид

Принцип на работа на CAN BUS
CAN шината използва два специални проводника за комуникация. Проводниците се наричат CAN high (висока) и CAN low (ниски). CAN контролерът е свързан към всички компоненти в мрежата чрез тези два проводника. Всеки мрежов възел има уникален идентификатор. Всички ECU в шината са ефективно паралелни и затова всички възли виждат всички данни през цялото време. Възел отговаря само когато открие свой собствен идентификатор. Отделните възли могат да бъдат премахнати от мрежата, без да засягат останалите възли.
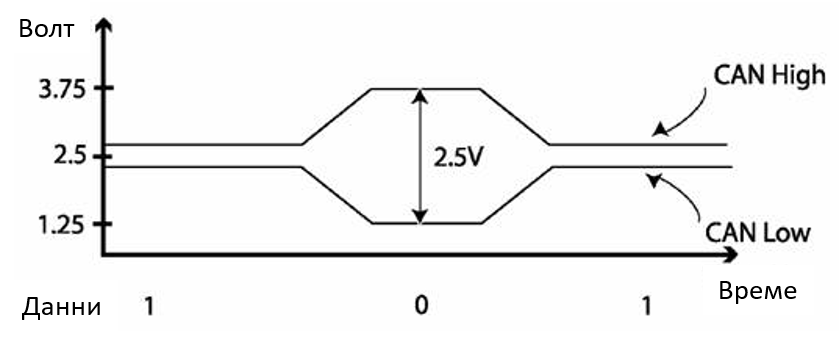
Когато шината CAN е в режим на празен ход, и двете линии носят 2.5V. Когато се предават битове за данни, високата линия на CAN отива на 3,75 V, а CAN ниската спада до 1,25 V, като по този начин генерира 2,5V разлика между линиите: всяка от линиите CAN се сравнява с другата, а не към заземяването. Тъй като комуникацията разчита на разликата в напрежението между двете шини, шината CAN не е чувствителна към индуктивни пикове, електрически полета или друг шум. Това прави CAN шината надежден избор за мрежови комуникации на мобилно оборудване.
CAN захранването може да се доставя чрез CAN шината. Или захранване за модулите на CAN шината може да бъде организирано отделно. Електрическото захранване може да бъде или напълно отделно от линиите на CAN шината, което води до използване на два двужилни кабела за мрежата, или може да бъде интегрирано в същия кабел като CAN шините, което води до един 4-проводник кабел.
Характерът на комуникациите на CAN шината позволява на всички модули да предават и получават данни по шината. Всеки модул може да предава данни, които всички останали модули получават. Много е важно честотната лента на шината CAN да бъде разпределена първо към най-критичните за безопасността системи. Обикновено всички възлите са присвоени на едно от редицата приоритетни нива. Например контрола на двигателя, спирачките и въздушните възглавници са много важни от гледна точка на безопасността и командите за активиране на тези системи са с най-висок приоритет. Това означава, че те ще действат пред по-малко критични. Аудио и навигационните устройства често са средно приоритетни и активирането на осветлението може да е с най-нисък приоритет. Процесът, известен като арбитраж, решава приоритета на всяко съобщение.
Повечето CAN мрежи на моторни превозни средства работят с шина от 250 kB / s или 500 kB / s. Най-новите превозни средства използват до 3 отделни CAN мрежи, обикновено с различна скорост, свързани заедно с входове. Данните в една от трите мрежи са достъпни за другите две мрежи. Функциите за управление на двигателя обикновено са на високоскоростна шина със скорост 500 kB / s, а системи на шасито работят на по-бавна CAN bus шина от 250 kB / s. Други функции като светлини, навигация и огледала са на отделна едножична шина LIN (Local Interconnect Network) с ниска скорост.
Процедура за проверка на надеждността на CAN шината с осцилоскоп
- Идентифицирайте CAN-H и CAN-L пиновете на достъпна точка в CAN мрежата.
Такъв момент обикновено е многопосочният конектор на ECU. - Задайте входовете на осцилоскопа на 5V
- Свържете изпитателния проводник на един от каналите на осцилоскопа към проводника CAN-H. След това свържете заземяващия кабел към заземяването на шасито. Свържете изпитвателния кабел на сигнала на един от другите канали на осцилоскопа към проводника CAN-L.
- Включете запалването.
- Гледайте екрана на осцилоскопа. Трябва да спазвате следните форми на вълната.
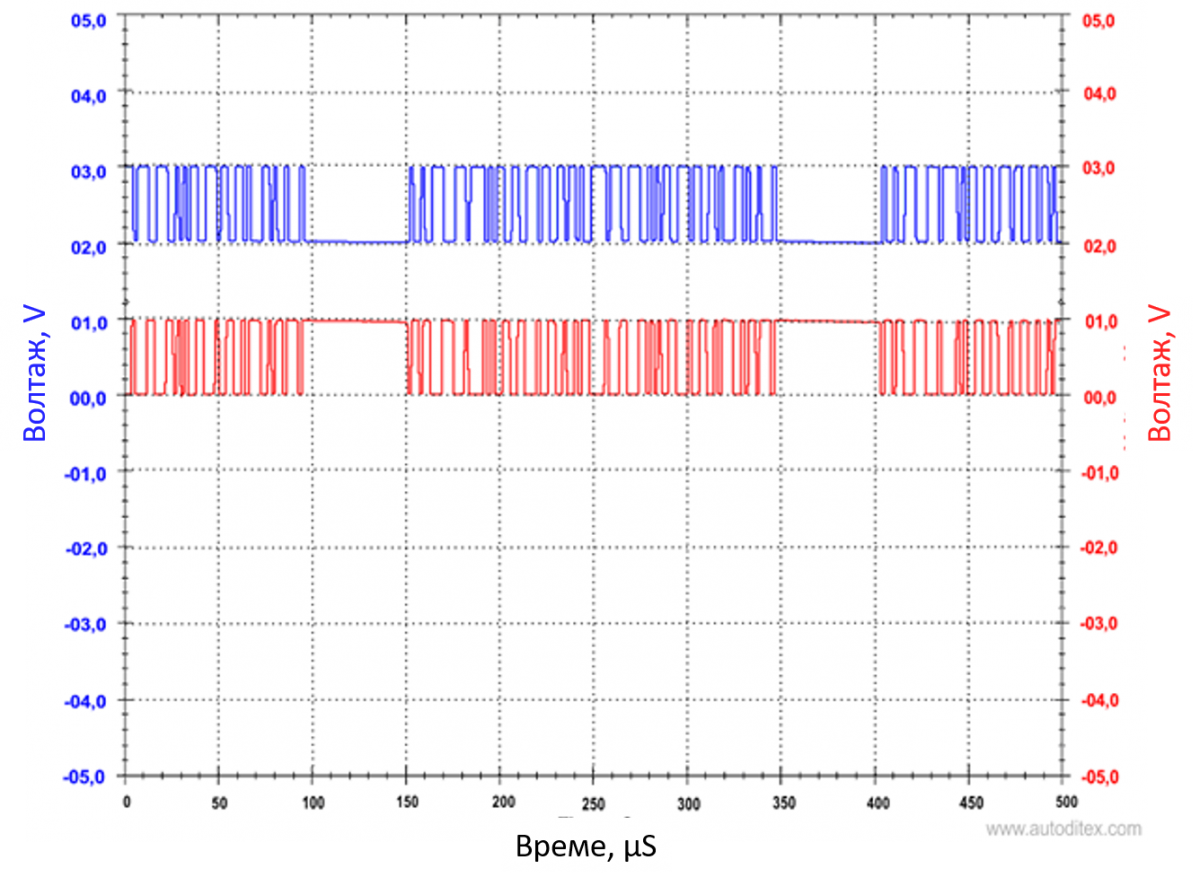
Измерването позволява да се извършват следните проверки:
- Проверете дали нивата на пиково и максимално напрежение са правилни
- Проверете дали сигналът присъства и на двата CAN проводника (CAN използва диференциална сигнализация, така че сигналът на една линия трябва да бъде огледален образ на данните на другата линия).
Възможни причини за неуспех в CAN BUS мрежата:
- Нивата на максимално напрежение не са правилни.
- Сигналът не присъства и на двата CAN проводника.
Стандартът ISO 11898 изброява няколко режима на отказ на кабела CAN шина:
- CAN_H прекъснат
- CAN_L прекъснат
- CAN_H окъсяване до напрежението на батерията
- CAN_L окъсяване до заземяване
- CAN_H окъсяване до заземяване
- CAN_L окъсяване до напрежението на батерията
- CAN_L окъсяване до CAN_H проводник
- CAN_H и CAN_L прекъсване на едно и също място
- Загуба на връзка с мрежата






Коментари